Amazing discoveries part 19… Swabbing and lubricant
Following his exploration on different steps to be taken towards optimising forming process stability and reducing the weight of glass containers, in the coming issues Paul Schreuders addresses amazing discoveries related to XPAR Vision’s BlankRobot development. Introduced to the market during glasstec 2018, the BlankRobot is true revolution in glass forming, where the amount of disturbances to the forming process is reduced drastically, hence paving the way for most effective forming process automation. Here, the focus is on swabbing and the BlankRobot itself.
As explained in issue 74, following the Paris Climate Change Conference (COP21) and taking their social responsibility seriously, many if not all food and beverage packing companies are actively working to reduce their carbon footprint. Since packaging is a substantial part of this carbon footprint, supply chain collaboration is a key for success. Knowing the competitive field of metal, plastics and bio-based packaging, for glass the keys to survival are to recycle and reduce weight (improving the content-to-glass ratio). Reducing weight requires further optimisation of forming process stability.
Netherlands-based XPAR Vision has led the development of hot end sensors for improved glass container forming for 20 years glass. During the recent glasstec exhibition in Dusseldorf, the company launched its own BlankRobot development.
As the name indicates, BlankRobot is designed not only for swabbing but for other applications as well. For swabbing, by applying a special lubricant together with a highly precise application, swabbing frequency is reduced to once every three hours, leaving enough time for the robot to execute other functions. In the following article, the special lubricant will be introduced and discussed.
Exclusive partnership
For the development of the BlankRobot concept of swabbing every three hours only, XPAR Vision and LubriGlass formed an exclusive partnership. LubriGlass is the developer and manufacturer of the special lubricant that is used exclusively with the BlankRobot. With years of experience in developing lubricants for glass-related products and processes, LubriGlass is a specialist in this field, bringing innovative applications and concepts.
LubriGlass originates from the TU Bergakademie Freiberg/Professorship Glass and was founded with the aim of developing technologies for surface improvement of mass glass products. The company supplies surface treatment technologies for flat glass, container glass and tableware. In flat glass manufacturing, the company is very successful with surface treatment technologies for higher strength and better resistance against external influences.
Lubricant
For container glass, this technology resulted in the development of a special lubricant (LGL2) for blank moulds, which is supported by a registered patent. Compared to traditional lubricants, LGL2 is distinctive in its composition, with aluminium ions added via a special process. In chemical connection with carbon, this results in a long lasting active layer of graphite to the blank surface.
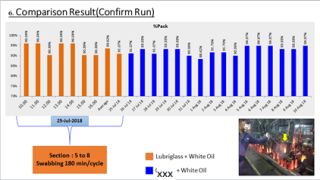
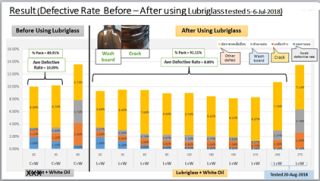
In recent years, the lubricant has been tested via manual swabbing by the operator at different glass container manufacturers with very similar results. Figure 1 lists results in terms of efficiency and defects.
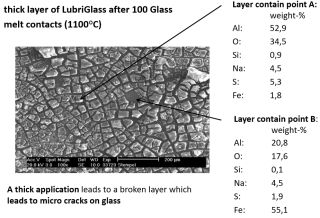
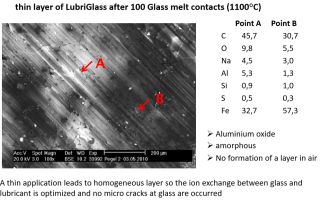
The conclusion was: “After using LubriGlass, we were able to increase the swabbing time from 20 min/cycle to 210 min/cycle and also found defective rates that were under standard acceptance rates.” At the same time, a second conclusion had to be made: “We cannot achieve consistent results in time, as manual swabbing by operators does not give consistent application of the lubricant.” This statement reveals the conditions in which the lubricant needs to be applied to the blanks. One of the conditions is that the layer of lubricant to the blank moulds needs to be very thin. Figure 2 shows LubriGlass examples of microscopic images of the aluminium-carbon layer that is formed to the blank surface where the layer is too thick and when applied in the correct layer thickness.
Consequently, another condition of application is that the time interval between swabbing actions needs to be as constant as possible. To control these two crucial conditions (correct thickness and timing) in a consistent way, the only option is to apply the LGL2 lubricant by means of a robot. And based on this conclusion, XPAR Vision and LubriGlass formed their partnership by combining their LGL2 lubricant and BlankRobot technologies (figure 3).
Other than current swabbing robots in the market, the XPAR Vision BlankRobot is specifically designed for extremely precise and highly repeatable lubricant application.

Benefits and savings
Generally, when installing a swabbing robot to the IS machine, the advantages seem to be obvious:
- Better product quality due to consistent and uniform lubricant application.
- Saving on swabbing oil.
- Saving on labour costs.
- Improved working conditions, with better air quality and increased work safety.
However, when talking to existing users of automatic swabbing systems employing robots, the results are not that clear. This is because current swabbing robots are only designed to replicate manual swabbing routines every 20-30 minutes or sometimes even more frequently (down to swabbing intervals of five minutes). Oil consumption savings are made but with very low financial benefit, as the cost of lubricant is insignificant compared to other costs or losses.
On top of that, the lubricants used in these robots are not suitable to swab neck rings as well, so manual operation is still needed, although generally in a lower frequency. The labour cost saving is not that obvious, therefore. And with the current swabbing robots occupying the IS machine with their actions frequently, the operator is hindered to perform his tasks time and time again, not improving forming process stability or performance.
Translating the benefits of the XPAR Vision concept of blank mould swabbing, achieving swabbing intervals of three hours or more with a very low oil consumption (10 times less than with current swabbing robots) the picture becomes clear. The benefits mentioned above are met truly but there are also performance and financial benefits to consider when eliminating disturbance to the forming process by swabbing; only every three hours with hardly any impact on the process and without rejecting swab bottles every 20 minutes. This not only gives higher output of good bottles but considerable financial gain as well.
Another aspect that is still not highlighted widely is the fact that blank mould surfaces remain clean over a longer period when swabbing with LGL2, which results in up to twice the time the blank moulds are in use before exchange. Consider how many mould sets can be saved and how much less work for the mould shop. Financially these benefits will be even bigger.
Last but not least, the three hours swabbing interval allows the BlankRobot to perform other tasks in the meantime, including baffle and/or deflector swabbing, automatic alignment of delivery and in-section diagnoses. These additional values are introduced in due time for increased process stability and more savings.
Overall, the BlankRobot and LGL2 lubricant represent a revolutionary step towards full forming process control.
Next steps
As with any innovative technology, with its market introduction the real learning has only just started. In future Amazing Discoveries series articles, these learnings will be shared.